Чередник П.Ф.
Метод уменьшения искажений в усилителях низкой частоты путем компенсации искажений на входе.
Введение
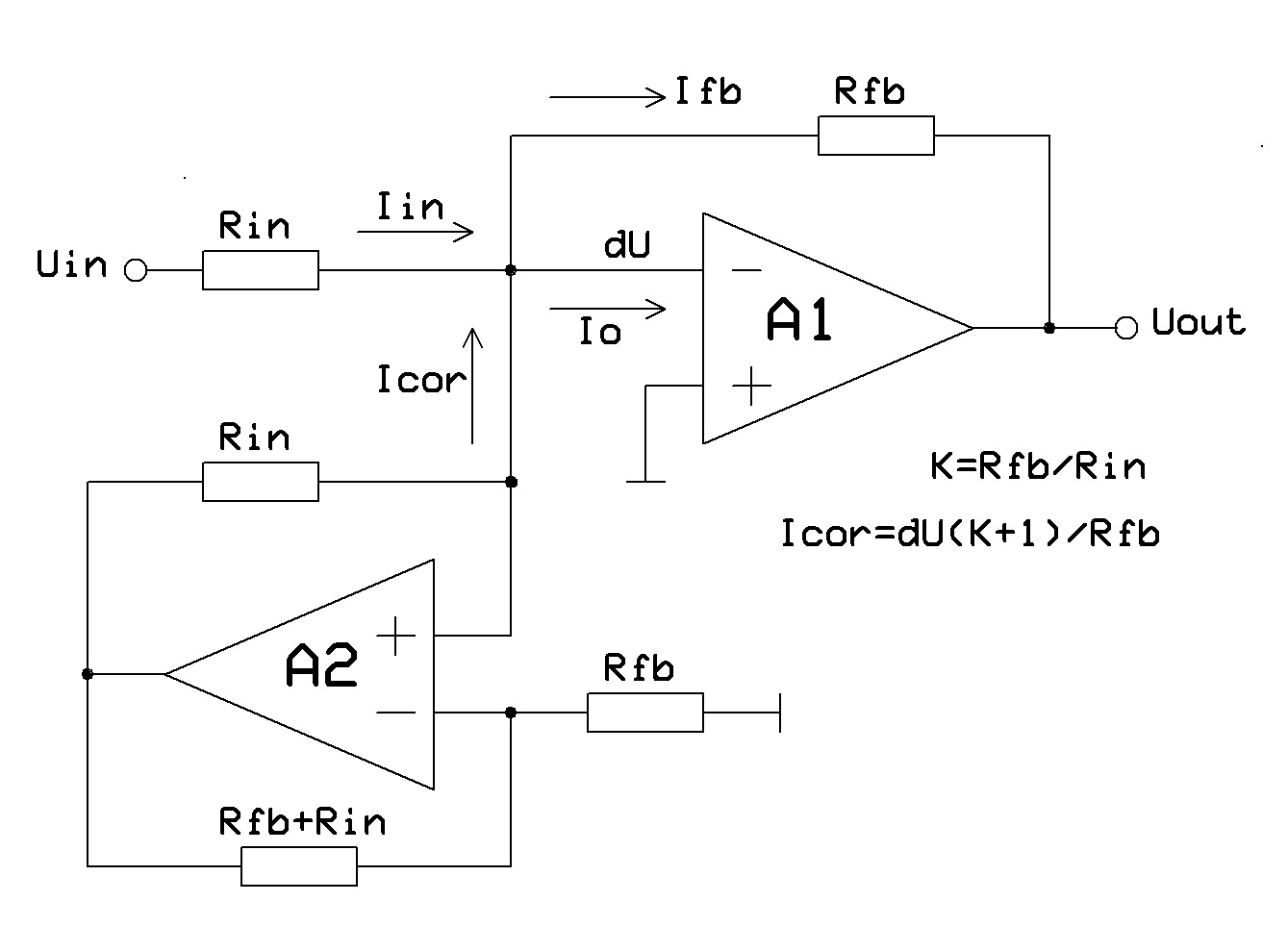
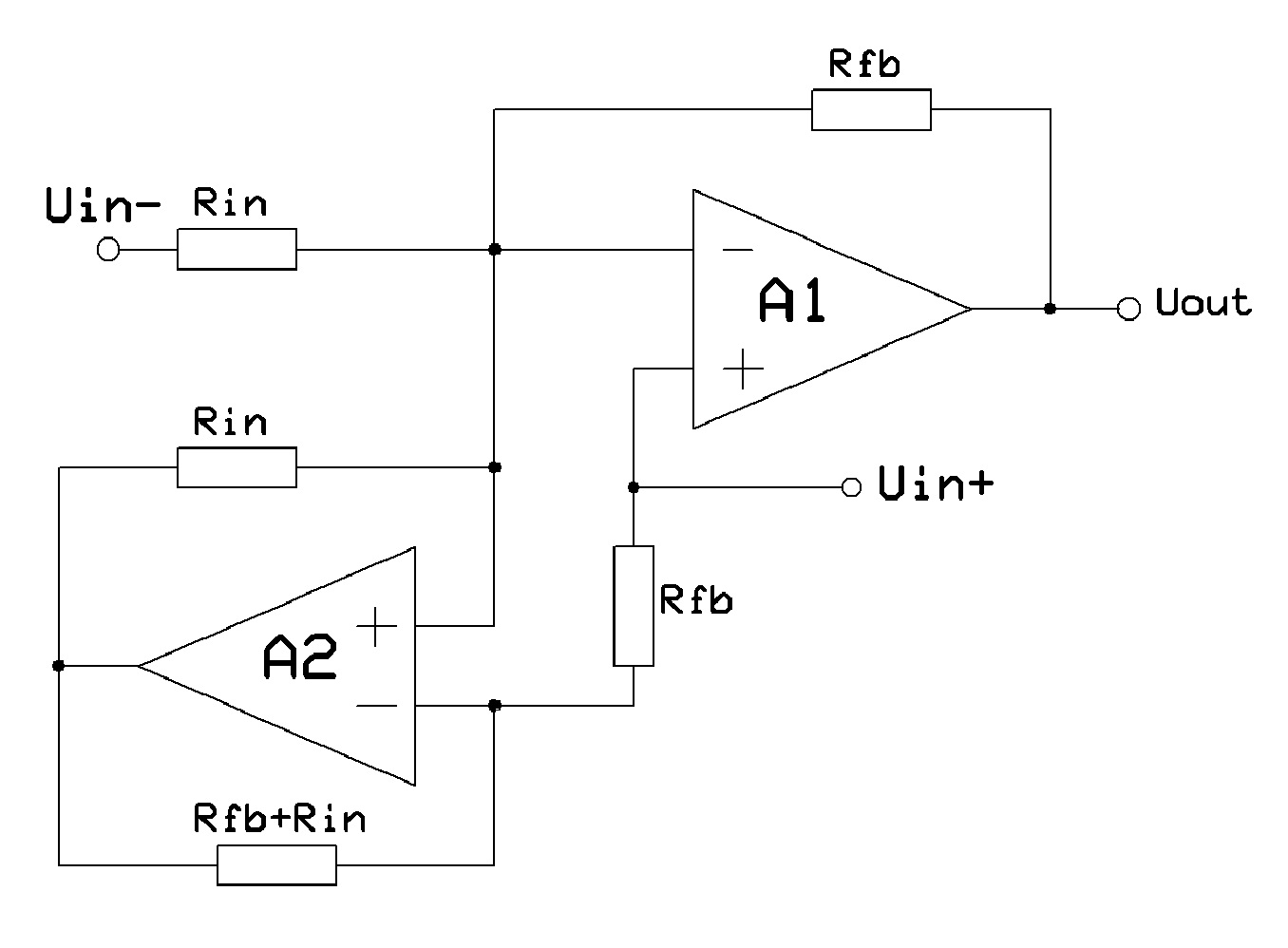
Реализация метода
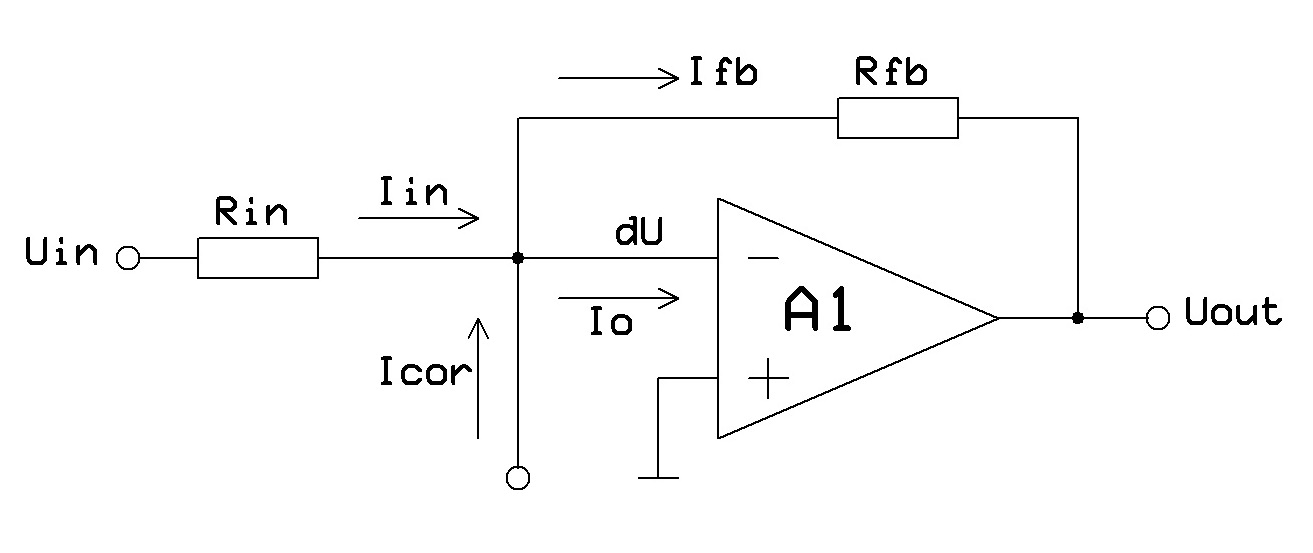
Uout = dU - Rfb (Iin + Icor) = dU - Rfb ((Uin - dU) / Rin + Icor)
Uout = dU(K+1) - RfbIcor - KUin (1)
Icor = dU (K + 1) / Rfb = dU (K + 1) / KRin (2)
Практическое испытание метода
Выводы
Литература