Павел Сидоров
Робот-спасатель нового поколения: Методика и концепция разработки
Робот-спасатель нового поколения: Методика и концепция разработки.
2021. " 41 с.
ГЛАВА 1. Введение
Конструктивные особенности:
PROBOT компании Robo-Team
Иллюстрации и чертежи
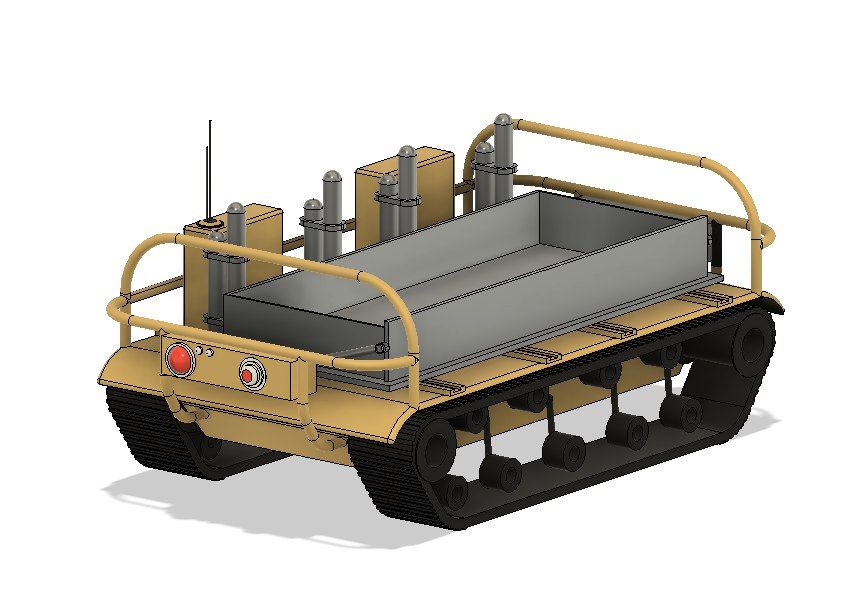

Рис. 1 Пострадавший ожидает прибытия робота
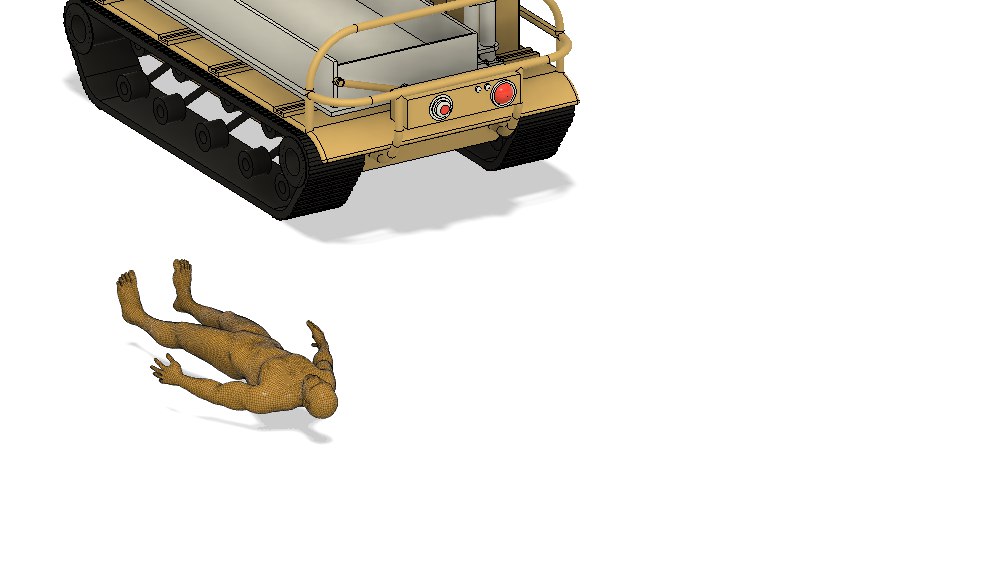
Рис. 2 Робот подъезжает в пострадавшему
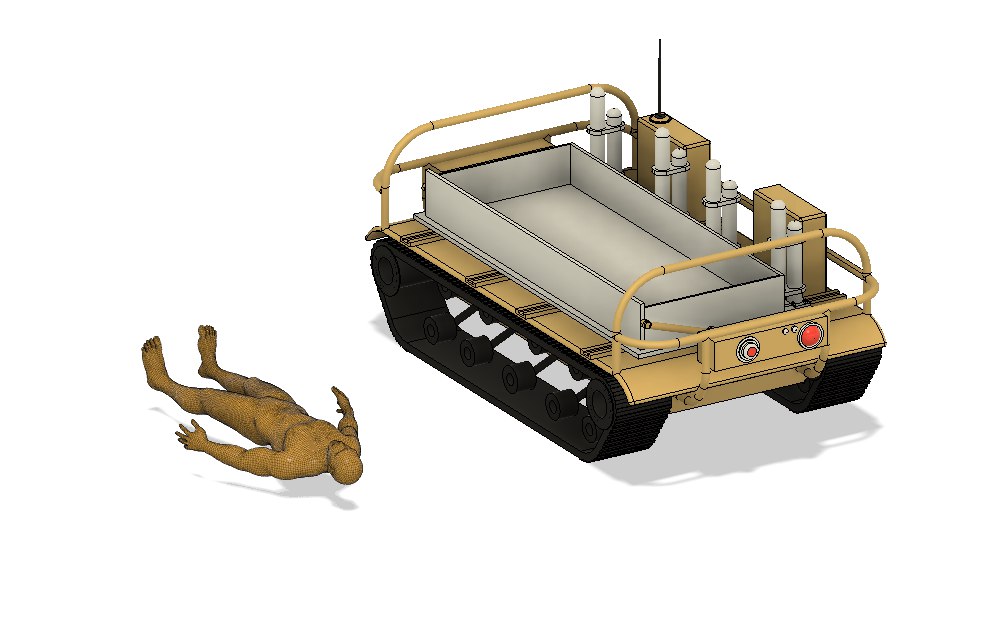
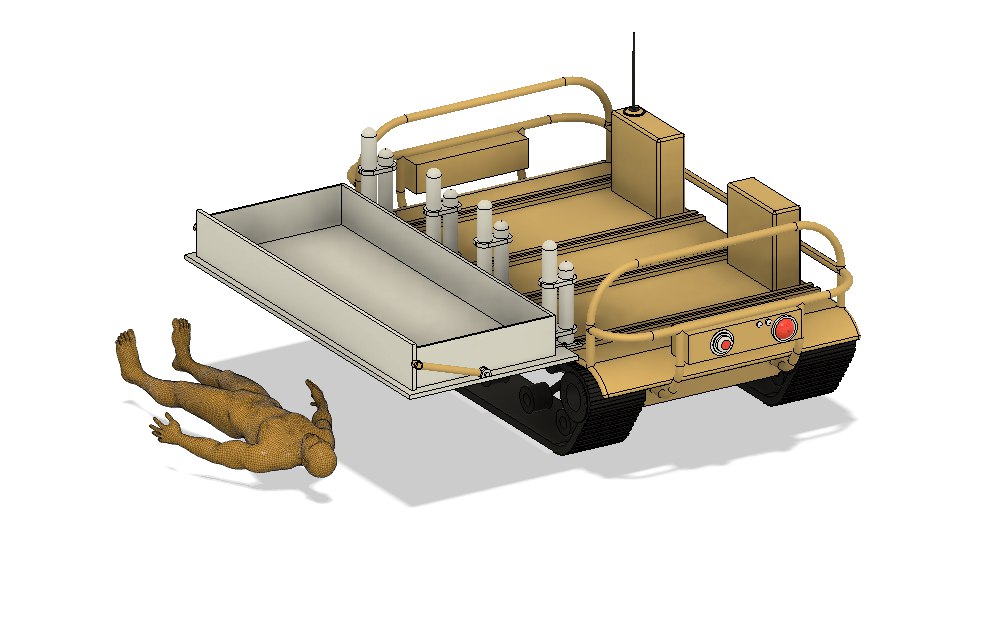
Рис. 4 Ложе выдвигается в горизонтальном направлении
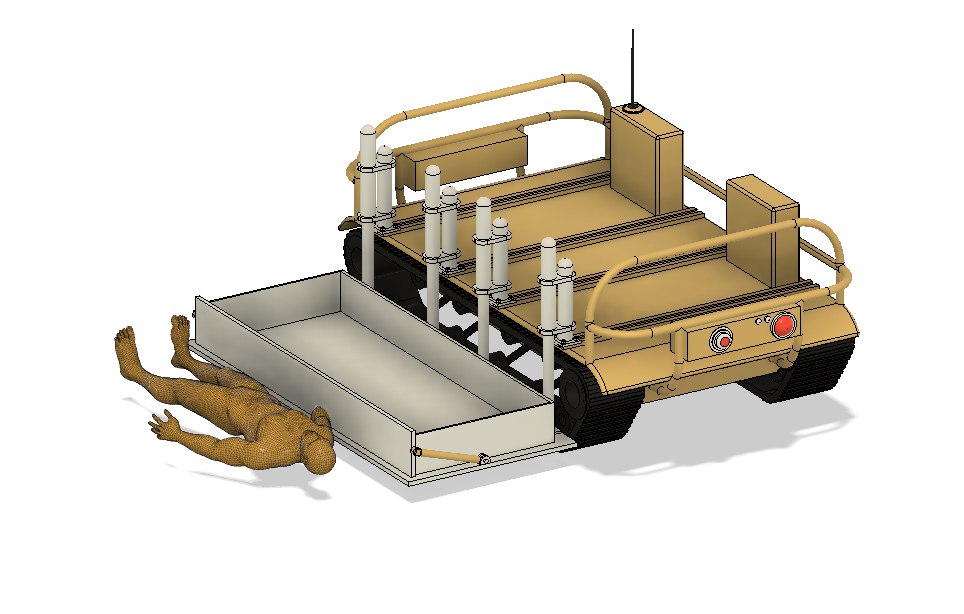
Рис 5. Ложе опускается на поверхность между роботом и пострадавшим, создавая удобное положение для погрузки.
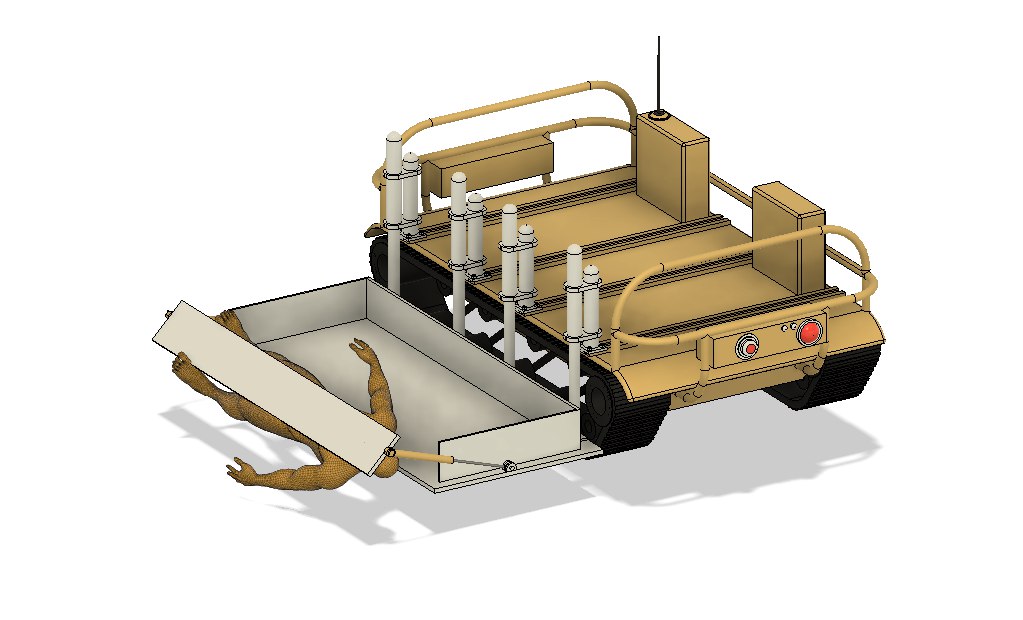
Рис. 6 Погрузка пострадавшего
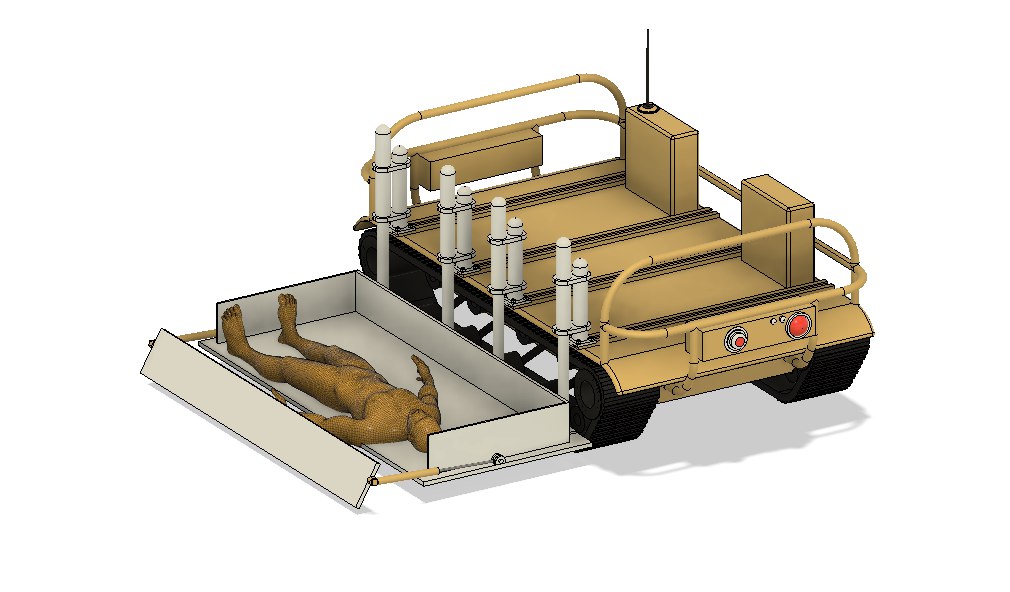
Рис. 7 Погрузка пострадавшего
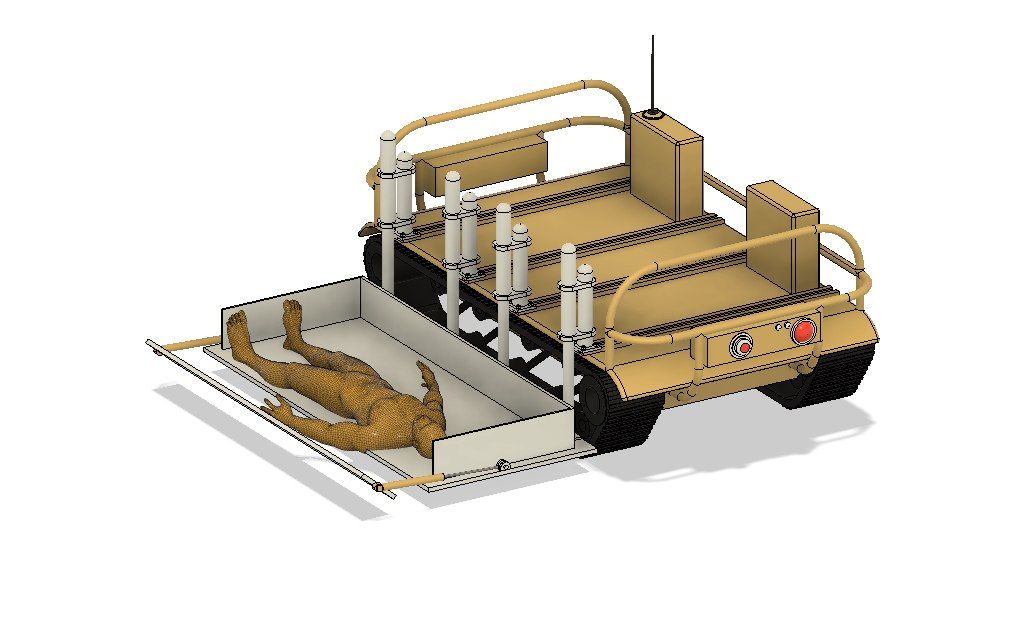
Рис. 8 Погрузка пострадавшего
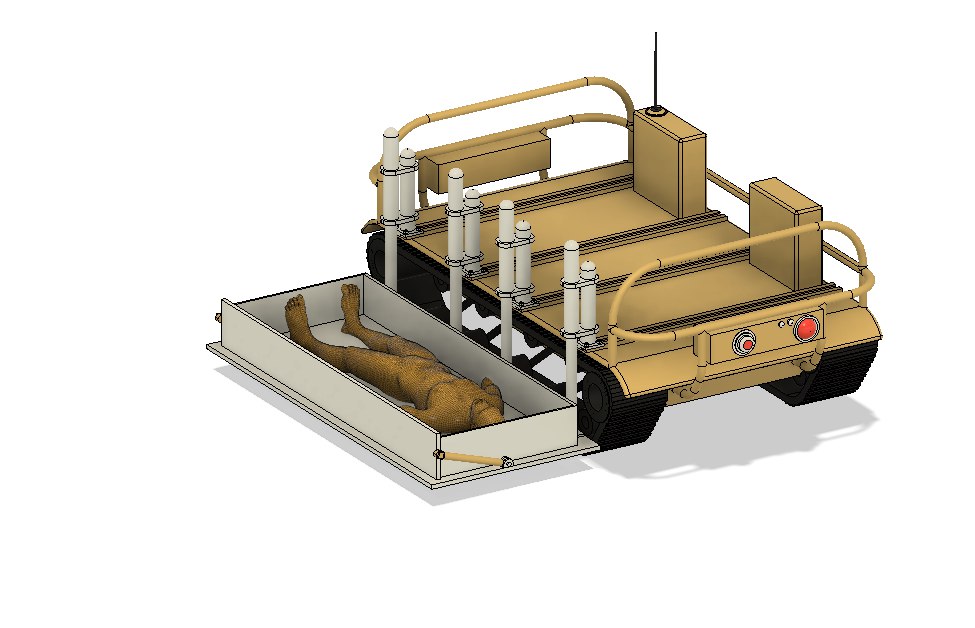
Рис. 9 Погрузка пострадавшего
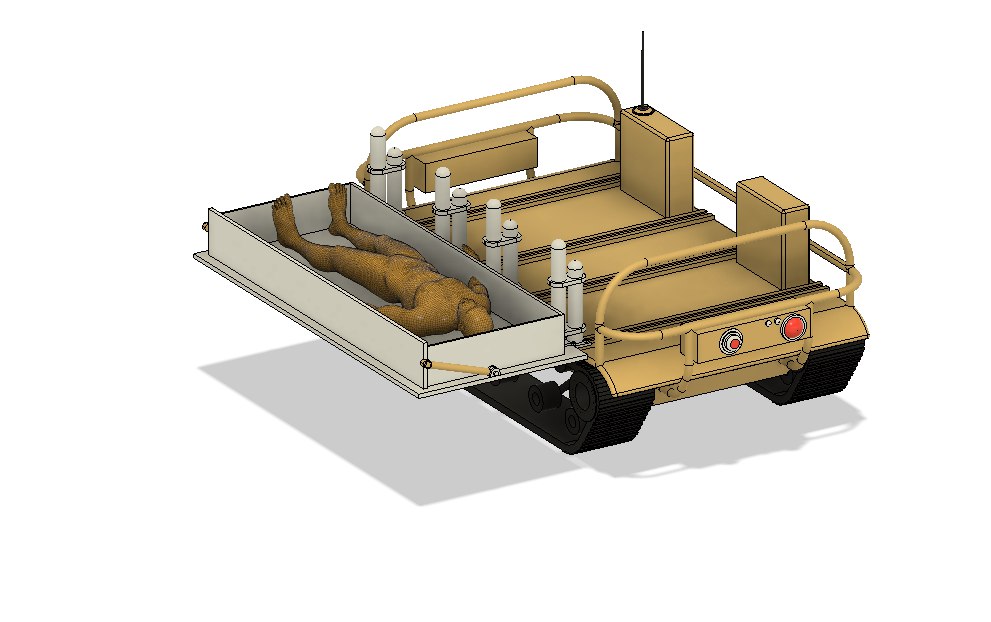
Рис. 10 Подъём пострадавшего на робот-эвакуатор
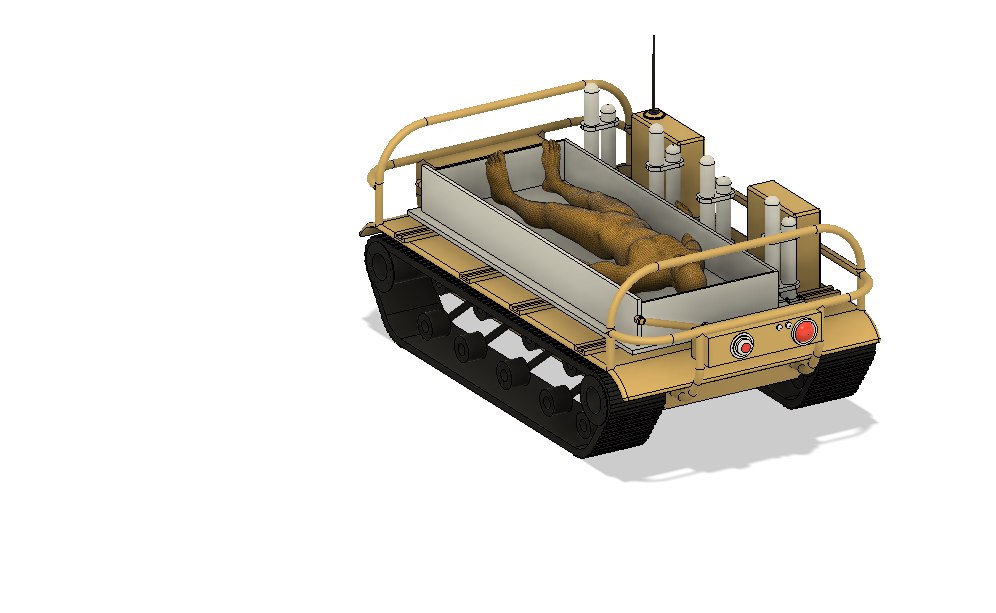
Рис. 11 Погрузка окончена. Выполняется дополнительная проверка безопасности, после чего пострадавший доставляется в безопасное место